
因物料在回轉窯設備中的煅燒存在多變量、大滯后、強耦合等特性,一般的控制設備已不能滿足其控制效果,針對以上問題,設計出了回轉窯設備復合控制器。
應用于回轉窯設備煅燒的復合控制器分為增量式PID操控和智能采用操控。在回轉窯設備輸入變量偏差及趨勢變化較大的情況下,選用智能采用操控,經過一段時間的觀察于調節,可以將偏差快速縮至較小。在偏差較小情況下應用增量式PID操控,對回轉窯設備煅燒實施綜合調整,并維持其穩態運轉。具體的復合控制器設計如下圖。
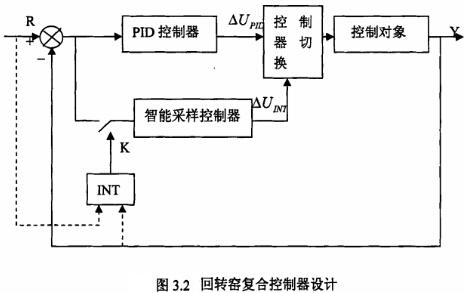
具體的復合控制器在回轉窯設備內的操作及布局詳情如下:
從圖中我們可以看到,INT即為智能器,其控制采用開關K,當滿足輸入量偏差或是趨勢大于某一闕值時,智能器控制采用開關閉合,智能采用控制器輸出,相反當系統輸入量不滿足開關閉合條件情況下,開關斷開,智能采用控制器不輸出。
在復合控制器切換過程中,其切換條件為:較小偏差范圍內可選用PID控制器,偏值較大且大于某一闕值或參數趨勢大于特定闕值時,則選用智能采用控制器。因PID操控和智能采用操控的輸出都屬于增量式輸出,因此在回轉窯設備運作過程中。控制器切換產生的擾動較小。